Steady state programming of controlled nonlinear systems via deep dynamic mode decomposition
Published in 2020 IEEE American Control Conference, Virtual Conference, 2020
Recommended citation: A. Hasnain, N. Boddupalli, E. Yeung. (2020). "Steady state programming of controlled nonlinear systems via deep dynamic mode decomposition." 2020 IEEE American Control Conference. arXiv preprint arXiv:1909.13385. http://aqibhasnain.github.io/files/hasnain2020steady.pdf
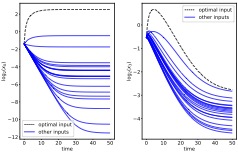
We frame the analog computing challenge of generating a steady state input-output function inside living cells. To program the steady state, a data-driven approach is taken wherein an approximation of the Koopman operator, identified via deep dynamic mode decomposition, is used to describe the dynamics of the system linearly. The new representation of the dynamics are then used to solve an optimization problem for the input which maximizes a direction in state space.